Question 1: What is the resolution of spin editing?
The resolution is also called the number of bits, pulse number, and several-wire system (this is called in absolute encoders). For incremental encoders, it is the number of pulses output by the encoder for one shaft rotation; for absolute encoders For example, if the resolution is 256P/R, it is equivalent to dividing a circle of 360° into 256, and outputting a code value every 1.4°. The unit of resolution is P/R.
Question 2: What is the output phase?
Incremental type refers to the number of output signals. Including 1 phase type (A phase), 2 phase type (A phase, B phase), 3 phase (A phase, B phase, Z phase). The Z-phase output once means that the signal for the origin is output once.
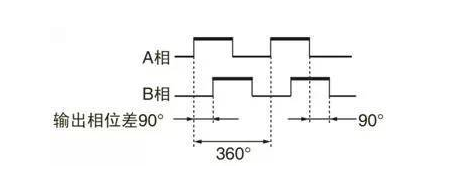
Question 3: What is the output phase difference?
When the shaft rotates, the ratio of the time offset in the rise or fall of the A-phase and B-phase signals to one cycle time of the signal, or the electrical angle to indicate that one cycle of the signal is 360°.
Phase A and Phase B are expressed as a phase difference of 90° in electrical angle.
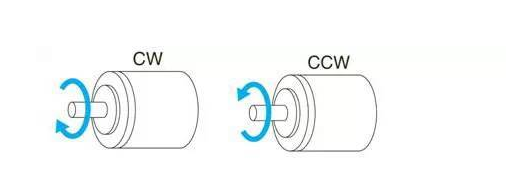
Question 4: What is CW/CCW?
CW is the direction of clockwise rotation (Clock Wise), as shown in the figure below. In this direction of rotation, usually the incremental type is A phase output before the B phase, and the absolute type is the code increase direction.
When rotating in the opposite direction of CW, it is CCW (Counter Clock Wise), as shown in the figure below. In this rotation direction, the incremental type is usually the B phase output before the A phase, and the absolute type is the code decreasing direction.
Question 5: What is the maximum response frequency and the maximum allowable speed?
The highest response frequency is the maximum number of frequencies that the encoder can respond electrically. If it is used at a frequency higher than this parameter, the encoder's internal circuit will not be able to respond, which will cause the encoder to leak pulses. The highest response frequency unit is Hz.
The maximum allowable speed refers to the highest speed that the encoder shaft can withstand when it is mechanically moved. If it is higher than this parameter, the encoder shaft may be damaged. The maximum allowable speed unit is r/min.
Note: In actual use, these two parameters need to be considered, and they must be less than the specified values of the two phase parameters before they can be used normally.
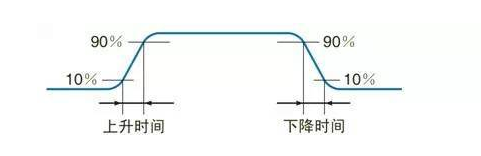
Question 6: What are rise time and fall time?
Rise time: the time for the output pulse to rise from 10% to 90%.
Fall time: the time for the output pulse to fall from 90% to 10%.
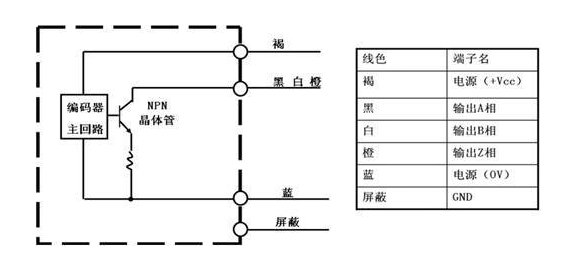
Question 7: What is the difference between open collector output, voltage output, complementary output and linear drive output of the rotary encoder output form?
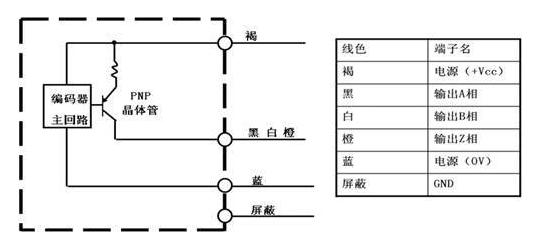
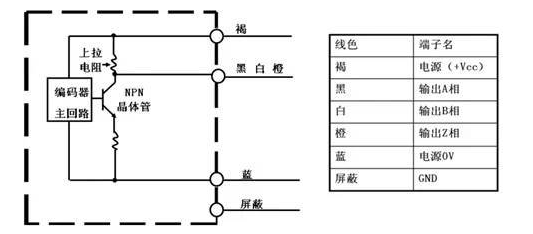
Open-collector output is an output circuit in which the emitter of the transistor of the output circuit is used as the common terminal and the collector is floating. Generally divided into NPN open collector output (see Figure 1) and PNP open collector output (see Figure 2)
Voltage output is based on the circuit of open-collector output. A pull-up resistor is connected between the power supply and the collector, so that there can be a stable voltage state between the collector and the power supply, as shown in Figure 3.
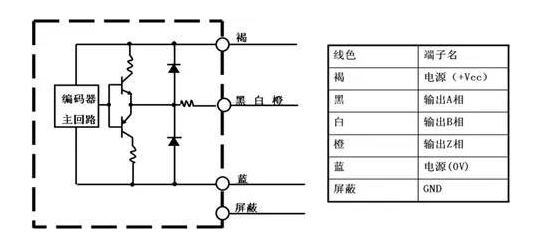
Complementary output is an output circuit with NPN and PNP output transistors. According to the [H] and [L] of the output signal, the two output transistors alternately perform [ON] and [OFF] actions. The transmission distance of the circuit is slightly longer than that of the open collector output circuit. It can also be connected to the open collector input device (NPN , PNP) connection. The output circuit is shown in Figure 4.
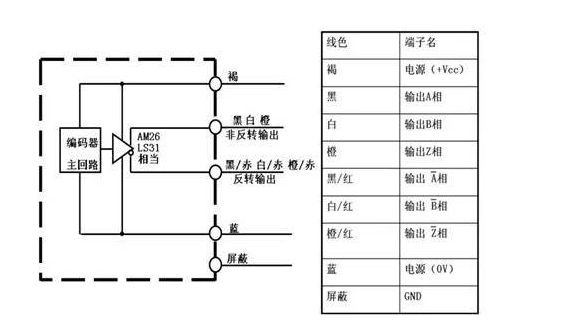
The linear drive output adopts the RS-422 standard and uses the AM26LS31 chip to be used in the output mode of high-speed and long-distance data transmission. The signal is output in differential form, so the anti-interference ability is stronger. The output signal can only be received by a device that can receive the linear drive output. The output circuit is shown in Figure 5.
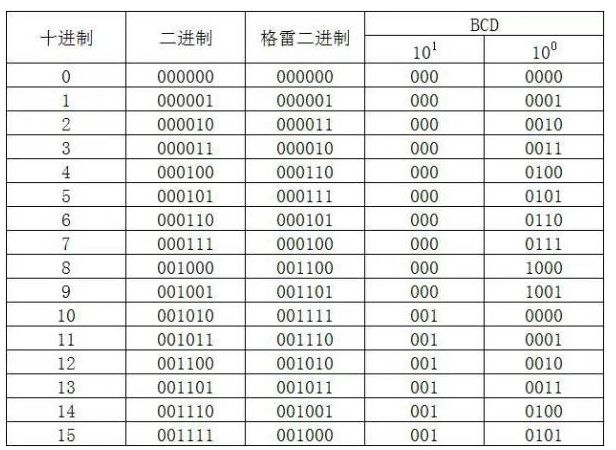
Question 8: What is the difference between the output code binary code, BCD code and Gray binary code of absolute encoder?
Binary code is a code that represents a value in binary form. The highest bit is represented by 2 to the power of n.
The BCD code is a decimal code expressed in binary form, and each decimal number is expressed in a binary code.
Gray binary code is a reliability code, in which all adjacent integers have only one digit different in their binary code, that is, when any two adjacent numbers are converted, only one digit changes, which greatly reduces The possibility of logic confusion from one state to the next.
Take the value 0-15 as an example, the code values of these three are shown in the table below.
Question 9: What is the difference between an incremental encoder and an absolute encoder?
The incremental encoder outputs a pulse signal, and the absolute encoder outputs an absolute code value.
The encoder is connected to the subsequent equipment (such as PLC), and the data is monitored in the input channel of the PLC. If it is an incremental encoder, all data in the non-power-off-retention channel will be cleared if the PLC is powered off and then powered on; If it is an absolute encoder, the original data is still maintained in the channel (provided that the shaft of the encoder has not rotated after the power is off).
Question 10: How to judge the quality of a rotary encoder?
(1) Connect to the PLC to check whether the number of pulses or code values are correct;
(2) Connect the oscilloscope to view the waveform;
(3) Use the multimeter voltage file to test whether the output is normal.
When the encoder is NPN output: measure the positive pole of the power supply and the signal output line
When the transistor is turned ON, the output voltage is close to the supply voltage,
The output voltage is close to 0V when the transistor is turned OFF.
When the encoder is PNP output: measure the negative pole of the power supply and the signal output line
When the transistor is turned ON, the output voltage is close to the supply voltage,
The output voltage is close to 0V when the transistor is turned OFF.
Public account (industry-care) recommended reading (click the title to try)
Machine Vision丨How to capture high-speed moving objects with a 1000 fps high-speed vision sensor
Motion Picture丨Analyze the working principle of the sensor
Professor Lecture丨Sensor Network and Internet of Things [Chen Di Shandong University]
Great God Leveling Compulsory Course丨Detailed explanation of the principle of industrial control instrumentation
On-site instrumentation [Wear, hear, and ask] is here!
The trend of machine vision replacing artificial vision is irreversible!
Our other product:












